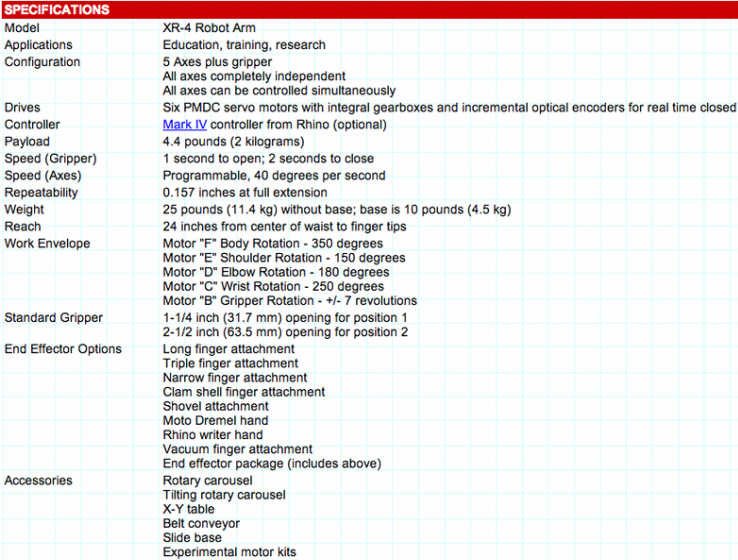
Rhino XR-4 Robotic Arm
The XR-4 is a robotic arm made by Rhino Robotics, Ltd. The XR-4 is a rugged and semi-enclosed five axis robot arm, whose axes are able to move independently and can be controlled simulataneously. It is constructed out of 0.125 inch and 0.250 inch thick aluminum plates and is powered by six PMDC servo motors with integral gearboxes and incremental encoders. The main applications for the XR-4 include education, training, and research. More detailed information about the Rhino XR-4 Robotic arm can be found below or on this page.
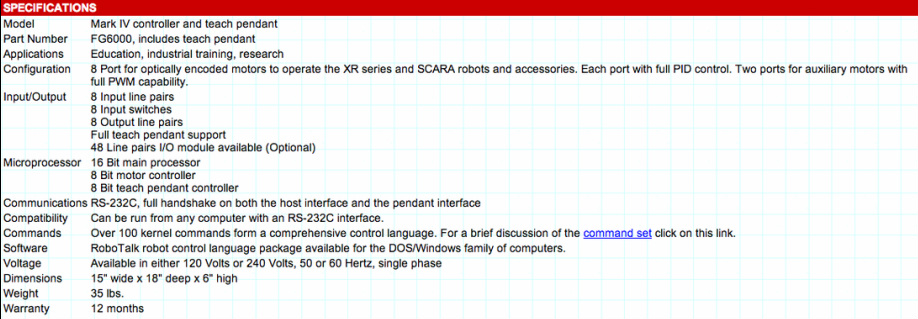
Mark IV Controller
To operate the Rhino XR-4, a Mark IV controller was used. The Mark IV controller, also by Rhino Robotics, Ltd., features an open system suitable for both teaching and experimentation. The Mark IV controller integrates the power supplies, communication, microprocessor logic, teach pendant support, input/output capability, and a software language. The controller can be connected and used with any Rhino XR series or SCARA robot. The proportional, integrative, and derivative (PID loop) control algorithms allow the user full speed control of up to eight encoded motors. The controller offers eight input line pairs, eight input switches, and eight output line pairs directly on the controller. All of the input and output (I/O) lines are current limited for safe operation and the I/O lines operate in the same manner as industrial grade input lines. The power required by the lines may be provided by the controller or another input device. The teach pendant that comes standard with each Mark IV Controller, supports its own microprocessor and communicates with the host via RS-232C. It supports two alphanumeric lines of 16 characters each for a fully functional conversational system. More detailed information about the Rhino XR-4 Robotic arm can be found below or on this page.